Underwater Robots - the future of offshore
- Sarah Whiteford

- Jan 15, 2022
- 6 min read
Why do we need underwater robots?
Underwater robots do work that is too dangerous or too expensive for human divers. They’ve evolved from simple underwater drones with cameras to sophisticated autonomous underwater vehicles, or AUVs that can operate independently of a pilot, carrying out tasks as needed. They inspect ships, repair underwater structures, map the oceans, perform scientific research, and even clean up oil spills. AUVs also solve one of the biggest downsides of traditional remotely operated vehicles, or ROVs: they need a pilot on-site in a vessel supported by a crew. Advances in technology now allow control by high speed internet controls and autonomous navigation for almost uninterrupted service. AI, or artificial intelligence is being used to teach underwater drones how to operate with minimal human input. AI allows robots to solve problems with programmed logic, for example instead of returning an error, an AI-powered machine would look for causes and solutions to that error. The solution could be as simple as the reboot of a device or navigating around an obstacle that wasn’t previously in its predefined path. There are already underwater vehicles being tested that stay in the water, completing tasks, charging, and going right back out again, without interference.
Underwater vehicle searching a shipwreck. “(Image credit: US Navy)”. Image from Live Science.
Short history of underwater vehicles
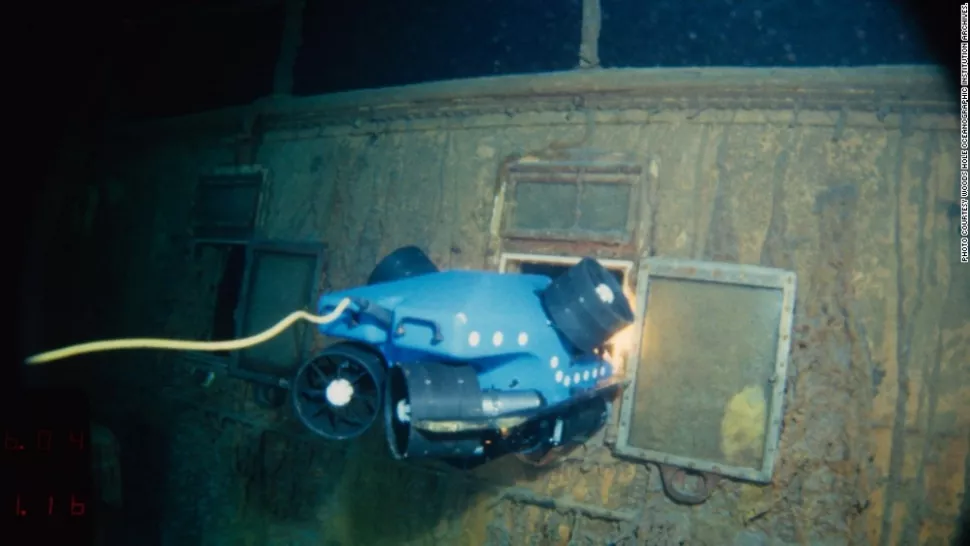
The first remotely operated vehicle, or ROV, was a tethered vehicle developed by Dimitri Rebikoff in 1953 called POODLE. The U.S. Navy really pushed ROV technology ahead in the 1960s for deep-sea rescue and recovery from the seabed. This was reflected in the name as the underwater devices were then called “Cable-Controlled Underwater Recovery Vehicle” (CURV), according to the Marine Technology Society ROV Committee. The vehicles were used for tasks like recovering a nuclear bomb lost in a B-52 crash in 1966 and rescuing the pilots of a submersible that sunk off the coast of Ireland in 1973 just before they ran out of air. The offshore oil and gas industry then advanced the technology to help with offshore oil fields by making ROVs like the HydroProducts RCV-225 and RCV-150. By the 1980s ROVs were required equipment because they could go farther than divers and offshore developments were being built in deeper waters. Technology kept improving and now we have many types of underwater robots that perform functions people couldn’t have dreamed of, like the team of Argo, ANGUS, and Jason Junior’s discovery of the Titanic shipwreck in 1985 and Nereus’s journey to the bottom of the Mariana Trench in 2009. Next, we’ll take a look at some interesting underwater vehicles and the future of AUVs.
Nereus

Nereus underwater autonomous vehicle. Image from Autonomous Undersea Vehicle Applications Center.
On May 31, 2009, an unmanned deep-sea robot dove into the Mariana Trench, reaching 10,902 meters, or 6.8 miles below the surface of the ocean. The vessel, built by Woods Hole Oceanographic Institution (WHOI) survived 15,000 pounds per square inch of pressure to journey to parts of the ocean that are almost completely unexplored by humanity. Nereus was tethered to the surface by a fiber-optic cable the width of a human hair that could break under 4 kilograms of pressure (since Nerus is autonomous, the cable has broken multiple times and the vessel continues to work as an AUV). It was only the third underwater vehicle to make it that far, after the manned Trieste built by the U.S. Navy went down in 1960 and the unmanned Kaiko, built in Japan, made three trips between 1995 and 1998.
Eelume

Eelume underwater robots. Image from Eelume.
Eelume is a self-propelled snake-shaped robot that spends all of its time underwater. For underwater maintenance, an ROV would normally be piloted by a crew on a vessel that would need to be on location for the duration of the project. Eelume stays on location on the sea floor, ready for subsea inspection, maintenance, and repair, or IMR without an on-site surface vessel. They are self propelled and flexible, able to fit into confined areas and use both ends of the unit for functions like lighting, inspection, and manipulation. The system is also modular with sections to support a variety of underwater tasks, including long range travel. Eelume is unaffected by weather conditions since it is underwater and requires no on-site crew. It can be used in offshore wind, oil and gas production, and any type of underwater inspection. The company was established in 2015 after being spun off from the Norwegian University of Science and Technology (NTNU) and partnered with Kongsberg and Equinor soon after in 2016. There is an excellent video below of Eelume’s capabilities from Equinor. A pilot program for Eelume is being completed at Åsgard field in the Norwegian Sea.
Video from Equinor.
Blueye

Blueye drone examining a ship propeller underwater. Image from Blueye.
Blueye is an underwater drone that is small, lightweight, and made for fast deployment to inspect subsea assets. The drone weighs about 20 pounds, has 5 hours of battery life, and can be easily deployed from almost anywhere. Sending a Blueye into the water means ship inspections can be completed without waiting for divers or specialized ROV operators, which can be a costly and time consuming endeavor. The drone live streams video back to operators and decision makers for fast results. Equinor uses Blueye to inspect the Kristin semi-submersible platform’s seawater intakes where vegetation growth like algae and mussels could block the intakes for the platform's fire fighting system. Blueye provides images to instantly let the crew know the state of intakes underwater. According to Blueye Robotics, it can also be used for aquaculture, marine research, and all types of underwater inspections. The newest generation has three guest ports for more external equipment to be connected like sensors, cameras, and sonars.
Subsea Shuttle

Rendering of a subsea shuttle moored at Stavanger Harbour for scale. “(Illustration: Equinor ASA / Photo: Thomas Wolter/Pixabay)”. Image from Equinor.
The subsea shuttle concept is a 135 meter long underwater shuttle designed to complete multiple tasks, one of which is transporting CO2 back to reservoirs. It’s a combination of drone and submarine technology that is built to transport its cargo under the sea, undisturbed by weather and other vessels. It has no emissions and a range of 300 km which means it could transport CO2 to reservoirs that aren’t being serviced by pipelines, similar to how the PowerX electricity transport vehicle we covered in our offshore power generation article could bring renewable energy to areas that don’t have the cable infrastructure to receive it. It could also transport oil or other materials to areas without pipelines, similar to a shuttle tanker, but underwater and unmanned. Check out the video below from Equinor on how the subsea shuttle would operate.
Video from Equinor.
Rapid underwater charging
Underwater charging is a big part of AUVs, since they are autonomous and don’t require a nearby pilot and crew, getting energy to keep them running 24/7 is the next hurdle. Many people are working on seabed and floating charging solutions, including Equinor, who has developed an underwater charging station designed to fit any underwater drone, similar to how gas stations all use a universal nozzle to fill your vehicle. It’s currently undergoing trials in the Trondheimsfjord.
“Team Halona’s design for a wave-powered autonomous underwater vehicle charging station.” Image from University of Hawai’i News.
In May 2021, Team Hālona from the University of Hawai’i “was selected as one of seven winners in the joint U.S. Department of Energy and NOAA Ocean Observing Prize: Design Contest”, according to the University of Hawai’i News. They designed an autonomous vehicle charging station that could provide continuous power to AUVs for predicting hurricanes. The station is wave powered, with the wave energy converter using wave movement to force air through a turbine, generating electricity. The next step is to build a prototype to test in early 2022 in ocean conditions at the U.S. Navy’s Maneuvering and Seakeeping Basin.
The future of underwater robotics
Robots make subsea operations safer and less expensive than requiring human divers - the future uses of underwater drones are almost limitless. Underwater vehicles have already journeyed to the Mariana Trench, rescued people, and inspected and worked on countless structures. As underwater charging technology matures, we will see AUVs stay underwater for months, perhaps even years at a time. Breakthroughs have also made it possible to explore underwater mining; companies are already studying mining the seabed for minerals and rare earth metals. Underwater vehicles have also continued to get smaller and now include handheld devices like Blueye that only weigh about 20 pounds and can be operated by anyone. Data from these drones will provide more opportunities to learn about the ocean, the organisms that live there, man made underwater structures, and create opportunities for safer and more efficient offshore work. Offshore wind farms and other forms of offshore energy will be catalysts to accelerate these technologies even faster.

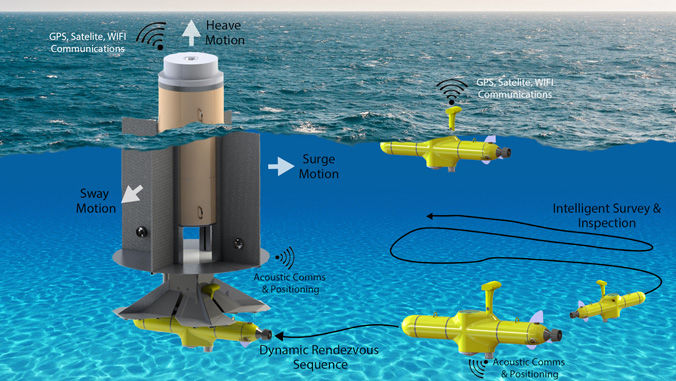
Underwater robot swarm rendering. “(Illustration by Tim Silva, Woods Hole Oceanographic Institution)”. Image from Woods Hole Oceanographic Institution.
Swarming is another concept that is coming soon - use many lower cost robots to map or survey an area instead of one expensive unit. According to Erin Fischell in an article on ASME, “Creating swarms of underwater vehicles will require three key technologies: inexpensive vehicles, inexpensive sensors, and a navigation/command and control scheme that allows vehicles to remain together in an area while collecting data”. As situational awareness of drones improves and their AI makes better decisions, they will continue to function more efficiently. We are already seeing AUVs perform manipulation of underwater objects like construction and repairs.
Walking, flying, and swimming robots are quickly becoming the norm offshore - if you want to learn more about ground and air-based offshore robotics, check out:
Happy Fun Fact Friday!
Sources:



Comments